Leaderboard

Popular Content
Showing content with the highest reputation on 11/28/2025 in all areas
-
@PGia Thanks for the encouragement and checking the results. I measure from the vertices instead of the lines. Those are calculated and the lines are just to connect the points. So perpendicular to the middle of segments of the centerline will always be a bit off, but if you measure from the vertices it should be centered correctly. Just like @GP_ said. I kept going in the same direction and I have made some improvements and got rid of some bugginess: The centerline should be a little more accurate now because of extra measurements (blue line) Crossing polylines get sharp corners on negative side Corner checks are done on all intersections of temporary line now (red line) More error checking so it doesn't crash on some of the example lines I left all of the 'animation' code commented out so you can give it a try ;| ; Calculate centerline between two polylines - dexus ; Function checks intersections of the offsets of two lines to create a middle/avarage line. ; https://www.cadtutor.net/forum/topic/98778-hybrid-parallel/page/6/#findComment-677339 ; Version 0.1 - Initial release 19-11-2025 ; Version 0.2 - Added corner support on negative side of crossing polylines 27-11-2025 ; Version 0.3 - Extra check using vertex to closest point as distance 28-11-2025 ; Version 0.4 - Added error function 28-11-2025 ; Version 0.5 - Improved distance check to prevent zigzag lines 01-12-2025 ; Version 0.6 - Check if offset can be used before adding points 01-12-2025 ; Version 0.7 - Improved side check on 3 points 01-12-2025 ; Version 0.8 - Don't compare startpoint to offset when eiter of the polylines is closed 04-12-2025 ; Version 0.9 - Add points for parallel end segments and set offsetgaptype 05-12-2025 |; (defun c:cpl (/ corners ent1 ent2 enx2 flipped gap loop maxlen offset offsetdistance parallel pts sides ss start te0 te1 te2 LM:ProjectPointToLine LM:intersections _addPoints _avarageAngle _checkOffset _cornerOffset _doOffset _getAnglesAtParam _getLength _polyline _rlw _side _wait *error*) (defun *error* (st) (if (wcmatch (strcase st t) "*break,*cancel*,*exit*") (redraw) (progn (vl-bt) (princ (strcat "\nOops! Something went wrong: ") st) ) ) (if (and te0 (not (vlax-erased-p te0))) (entdel te0)) (if (and te1 (not (vl-catch-all-error-p te1))) (mapcar 'vla-delete te1)) (if (and te2 (not (vl-catch-all-error-p te2))) (mapcar 'vla-delete te2)) (princ) ) ;| ; Draw Polyline - dexus ; Draw a polyline from a list of points, but filter out colinear points ; @Param lst list of points ; @Returns ename of polyline |; (defun _polyline (lst closed / prev pts) (while lst (cond ( (and (cdr lst) prev (or (equal (cdr lst) prev 1e-8) ; Remove duplicate points (null (inters prev (car lst) prev (cadr lst))) ; Remove collineair points ) ) ) ((setq pts (cons (cons 10 (setq prev (car lst))) pts))) ) (setq lst (cdr lst)) ) (entmakex (append (list (cons 0 "LWPOLYLINE") (cons 100 "AcDbEntity") (cons 100 "AcDbPolyline") (cons 90 (length pts)) (cons 8 (getvar 'clayer)) (cons 70 (if closed 1 0)) ) (reverse pts) ) ) ) (defun _side (pline pnt / cpt end target der) ; https://www.theswamp.org/index.php?topic=55685.msg610429#msg610429 (setq cpt (vlax-curve-getClosestPointTo pline pnt) end (vlax-curve-getEndParam pline) target (vlax-curve-getParamAtPoint pline cpt) der (if (and (equal target (fix target) 1e-8) (or (vlax-curve-isClosed pline) (and (not (equal (vlax-curve-getStartParam pline) target 1e-8)) (not (equal end target 1e-8))) ) ) (mapcar '- (polar cpt (angle '(0 0) (vlax-curve-getFirstDeriv pline (rem (+ target 1e-3) end))) 1.0) (polar cpt (angle (vlax-curve-getFirstDeriv pline (rem (+ (- target 1e-3) end) end)) '(0 0)) 1.0) ) (vlax-curve-getFirstDeriv pline target) ) ) (minusp (sin (- (angle cpt pnt) (angle '(0.0 0.0) der)))) ) ;; Intersections - Lee Mac ;; mod - [int] acextendoption enum of intersectwith method (defun LM:intersections ( ob1 ob2 mod / lst rtn ) (if (and (vlax-method-applicable-p ob1 'intersectwith) (vlax-method-applicable-p ob2 'intersectwith) (setq lst (vlax-invoke ob1 'intersectwith ob2 mod)) ) (repeat (/ (length lst) 3) (setq rtn (cons (list (car lst) (cadr lst) (caddr lst)) rtn) lst (cdddr lst)) ) ) (reverse rtn) ) (defun _getLength (ent) (- (vlax-curve-getDistAtParam ent (vlax-curve-getEndParam ent)) (vlax-curve-getDistAtParam ent (vlax-curve-getStartParam ent)) ) ) (defun _wait (msec) (not ( (lambda (start) (while (< (- (getvar 'millisecs) start) msec)) ) (getvar 'millisecs) ) ) ) (defun _addPoints (lst ent1 ent2 pts / len1 len2) (setq len1 (_getLength ent1) len2 (_getLength ent2) lst (vl-remove nil (mapcar (function (lambda (pt / d1 d2) (if (and (setq d1 (vlax-curve-getDistAtPoint ent1 pt)) (setq d2 (vlax-curve-getDistAtPoint ent2 pt)) ) (list (cond ((and (vlax-curve-isclosed ent1) (not (vlax-curve-isclosed ent2))) (/ d2 len2)) ((vlax-curve-isclosed ent2) (/ d1 len1)) ((+ (/ d1 len1) (/ d2 len2))) ) pt ) ) )) lst ) ) pts (append lst pts)) ; Animation ; (setq pts (vl-sort pts (function (lambda (a b) (< (car a) (car b)))))) ; (redraw) ; (foreach pt lst ; (tmpPoint (cadr pt) 1 1) ; ) ; ( ; (lambda (lst) ; (while (cadr lst) ; (grdraw (cadar lst) (cadar (setq lst (cdr lst))) 3) ; ) ; ) ; pts ; ) ; (vla-update ent1) ; (_wait 40) ; End animation pts ) (defun _checkOffset (ent1 ent2 offset) (or (vlax-curve-isclosed ent1) (vlax-curve-isclosed ent2) (and (equal (distance (vlax-curve-getStartPoint ent1) (vlax-curve-getStartPoint ent2)) offset 1e-4) (equal (distance (vlax-curve-getEndPoint ent1) (vlax-curve-getEndPoint ent2)) offset 1e-4) ) ) ) (defun _doOffset (offset / lst rtn) ; Global vars: pts ent1 ent2 sides te1 te2 (setq te1 nil) (setq te2 nil) (setq rtn (cond ((equal offset 0.0 1e-8) (if (setq lst (LM:intersections ent1 ent2 acExtendNone)) (setq pts (_addPoints lst ent1 ent2 pts)) ) lst ) ( (or ; Make offset (vl-catch-all-error-p (setq te1 (vl-catch-all-apply 'vlax-invoke (list ent1 'Offset (if (car sides) offset (- offset)))))) (cdr te1) (vl-catch-all-error-p (setq te2 (vl-catch-all-apply 'vlax-invoke (list ent2 'Offset (if (cadr sides) offset (- offset)))))) (cdr te2) (not (_checkOffset ent1 (car te1) offset)) (not (_checkOffset ent2 (car te2) offset)) (vla-put-visible (car te1) :vlax-false) (vla-put-visible (car te2) :vlax-false) ) (princ "\nOffset failed. ") nil ) ((setq lst (LM:intersections (car te1) (car te2) acExtendNone)) (if parallel ; Add points of parallel end segments (mapcar (function (lambda (ent1 ent2) (mapcar (function (lambda (pt) (if (equal pt (vlax-curve-getClosestPointTo ent2 pt) 1e-10) (setq lst (cons pt lst)) ) )) (list (vlax-curve-getStartPoint ent1) (vlax-curve-getEndPoint ent1) ) ) )) (list (car te1) (car te2)) (list (car te2) (car te1)) ) ) (setq pts (_addPoints lst (car te1) (car te2) pts)) lst ) ) ) (if (and te1 (not (vl-catch-all-error-p te1))) (mapcar 'vla-delete te1)) (if (and te2 (not (vl-catch-all-error-p te2))) (mapcar 'vla-delete te2)) rtn ) ;| ; Project Point onto Line - Lee Mac ; @Param pt point to project ; @Param p1 first point of line ; @Param p2 second point of line ; @Returns projected point |; (defun LM:ProjectPointToLine ( pt p1 p2 / nm ) (setq nm (mapcar '- p2 p1) p1 (trans p1 0 nm) pt (trans pt 0 nm)) (trans (list (car p1) (cadr p1) (caddr pt)) nm 0) ) (defun _getAnglesAtParam (ent pa / ang1 ang2) (if (and (vlax-curve-isClosed ent) (= pa 0)) ; Special case for closed Polyline (setq ang1 (vlax-curve-getFirstDeriv ent 1e-14) ang2 (vlax-curve-getFirstDeriv ent (- (fix (vlax-curve-getEndParam ent)) 1e-14))) (setq ang1 (vlax-curve-getFirstDeriv ent (+ pa 1e-14)) ang2 (vlax-curve-getFirstDeriv ent (- pa 1e-14))) ) (if (and ang1 ang2) (list (angle '(0 0 0) ang1) (angle '(0 0 0) ang2) ) ) ) ;| ; Avarage Angle - dexus ; Get angle of a line between two angles ; @Param ang1 real - Angle in radians ; @Param ang2 real - Angle in radians ; @Returns real - Angle in radians |; (defun _avarageAngle (ang1 ang2) (if (< (rem (+ ang1 pi) (+ pi pi)) (rem (+ ang2 pi) (+ pi pi)) ) (+ (* (- ang2 ang1) 0.5) ang1) (+ (* (- ang1 ang2) 0.5) ang2) ) ) ;| ; Calculate exact offset distance on a corner - dexus ; pt1 - Point on corner ; pt2 - Point on other side ; pt3 - Center for bisector ; pt4 - Target for corner of the offset ; pt5 - Find perpendicular point for offset distance ; / ; / ; -------- pt1 pt5 ; \ / ; pt4 ; \ ; ---- pt3 ----- pt2 ----- ; ; @Param ent1 Line to check corners ; @Param ent2 Opposing line ; @Returns List of offset distances (pt1 -> pt5) to calculate |; (defun _cornerOffset (ent1 ent2 / ang1 ang1a ang2 ang3 index pt1 pt2 pt3 pt4 pt5 rtn) (setq index 0) (repeat (fix (vlax-curve-getEndParam ent1)) (and (setq pt1 (vlax-curve-getPointAtParam ent1 index)) ; Point on corner (setq ang1 (_getAnglesAtParam ent1 index)) ; Angles of pt1 (setq ang1a (_avarageAngle (car ang1) (cadr ang1))) (setq te0 (entmakex (list (cons 0 "line") (cons 10 pt1) (cons 11 (polar pt1 (- ang1a halfPi) 1))))) ; Temp line for finding the angle on the other side (foreach pt2 (LM:intersections (vlax-ename->vla-object te0) ent2 acExtendThisEntity) ; Point on other side (and (setq ang2 (_getAnglesAtParam ent2 (vlax-curve-getParamAtPoint ent2 pt2))) ; Angle of pt2 (if (equal (rem (car ang1) pi) (rem (car ang2) pi) 1e-8) ; Is parallel? (and (setq parallel (or parallel (< index 1) (<= (fix (vlax-curve-getEndParam ent1)) (1+ index)) t)) (setq pt3 (mapcar (function (lambda (a b) (* (+ a b) 0.5))) pt1 pt2)) ; Midpoint (setq ang3 (car ang1)) ; Same angle als ang1 ) (and (setq pt3 (inters pt1 (polar pt1 (car ang1) 1) pt2 (polar pt2 (car ang2) 1) nil)) ; Find center for bisector (setq ang3 (_avarageAngle (angle pt1 pt3) (angle pt2 pt3))) ; Angle of bisector ) ) (setq pt4 (inters pt3 (polar pt3 ang3 1) pt1 (polar pt1 (+ ang1a halfPi) 1) nil)) ; Find target for corner of the offset (setq pt5 (LM:ProjectPointToLine pt4 pt1 (polar pt1 (+ (car ang1) halfPi) maxlen))) ; Find perpendicular point for offset distance (setq rtn (cons (distance pt1 pt5) rtn)) ; Return offset distance ; Animation ; (progn ; (redraw) ; (grdraw pt1 pt2 1) ; (grdraw pt4 pt5 2) ; (grdraw pt1 pt5 2) ; (grdraw pt2 pt5 2) ; (vla-update ent1) ; (_wait 120) ; ) ; End Animation ) ) ) (if (and te0 (not (vlax-erased-p te0))) (entdel te0)) (setq index (1+ index)) ) rtn ) (defun _rlw (lw / x1 x2 x3 x4 x5 x6) (if (and lw (= (cdr (assoc 0 lw)) "LWPOLYLINE")) (progn (foreach a1 lw (cond ((= (car a1) 10) (setq x2 (cons a1 x2))) ((= (car a1) 40) (setq x4 (cons (cons 41 (cdr a1)) x4))) ((= (car a1) 41) (setq x3 (cons (cons 40 (cdr a1)) x3))) ((= (car a1) 42) (setq x5 (cons (cons 42 (- (cdr a1))) x5))) ((= (car a1) 210) (setq x6 (cons a1 x6))) (t (setq x1 (cons a1 x1))) ) ) (append (reverse x1) (append (apply (function append) (apply (function mapcar) (cons 'list (list x2 (cdr (reverse (cons (car x3) (reverse x3)))) (cdr (reverse (cons (car x4) (reverse x4)))) (cdr (reverse (cons (car x5) (reverse x5)))) )) )) x6) ) ) ) ) (if (and (not (while (cond ((not (setq ss (ssget '((0 . "LWPOLYLINE"))))) (princ "\nNothing selected. Try again...\n") ) ((/= (sslength ss) 2) (princ "\nSelect 2 polylines! Try again...\n") ) ((and (setq ent1 (ssname ss 0)) (setq ent2 (ssname ss 1)) (setq enx2 (entget ent2)) (setq ent1 (vlax-ename->vla-object ent1)) (setq ent2 (vlax-ename->vla-object ent2)) ) nil ; Stop loop ) ) ) ) ent1 ent2 ) (progn (and (< (distance (vlax-curve-getStartPoint ent1) (vlax-curve-getEndPoint ent2)) (distance (vlax-curve-getEndPoint ent1) (vlax-curve-getEndPoint ent2)) ) (setq flipped t) (entmod (_rlw enx2)) ) (setq sides (mapcar (function (lambda (a b / s m e) (setq s (_side a (vlax-curve-getStartPoint b)) m (_side a (vlax-curve-getPointAtParam b (* 0.5 (vlax-curve-getEndParam b)))) e (_side a (vlax-curve-getEndPoint b))) (or (and s m) (and s e) (and m e)) )) (list ent1 ent2) (list ent2 ent1) ) ) (if (not (numberp halfPi)) (setq halfPi (* pi 0.5))) (setq maxlen (* 1.1 (max (_getLength ent1) (_getLength ent2) ( (lambda (ent1 ent2 / step de1 div p_step dis dmax) (setq step (/ (setq de1 (vlax-curve-getDistAtParam ent1 (vlax-curve-getEndParam ent1))) 500) div step dmax 0.00) (while (< div de1) (setq p_step (vlax-curve-getPointAtDist ent1 div) dis (distance p_step (vlax-curve-getClosestPointTo ent2 p_step))) (if (> dis dmax) (setq dmax dis)) (setq div (+ div step)) ) dmax ) ent1 ent2 ) ) ) ) (mapcar ; Add half distances from closest point to every vertex (function (lambda (ent1 ent2 / index pt) (setq index 0) (repeat (fix (vlax-curve-getEndParam ent1)) (setq pt (vlax-curve-getPointAtParam ent1 index) corners (cons (* (distance pt (vlax-curve-getClosestPointTo ent2 pt)) 0.5) corners) index (1+ index)) ; Animation ; (redraw) ; (grdraw pt (vlax-curve-getClosestPointTo ent2 pt) 4) ; ( ; (lambda (mid) (grdraw mid (polar mid (+ (angle pt (vlax-curve-getClosestPointTo ent2 pt)) halfPi) (car corners)) 2)) ; (mapcar (function (lambda (a b) (* (+ a b) 0.5))) pt (vlax-curve-getClosestPointTo ent2 pt)) ; ) ; (vla-update ent1) ; (_wait 120) ; End animation ) )) (list ent1 ent2) (list ent2 ent1) ) (setq corners (vl-sort (append corners (_cornerOffset ent1 ent2) (_cornerOffset ent2 ent1)) '<) offsetdistance (/ maxlen 512.0)) (if (LM:intersections ent1 ent2 acExtendNone) ; For crossing polylines, add negative values (setq offset (- maxlen) corners (append (mapcar '- (reverse corners)) corners)) (setq offset 0.0) ) (setq gap (getvar 'offsetgaptype)) (setvar 'offsetgaptype 0) (while (progn (while (and corners (> offset (car corners))) ; Calculated offset values to check (_doOffset (car corners)) (setq corners (cdr corners)) ) (setq loop ; Incremental check (cond ((> offset maxlen) nil) ((_doOffset offset) (setq start t)) ((not start) t) (start nil) ) ) (setq offset (+ offset offsetdistance)) loop ) ) (setvar 'offsetgaptype gap) (if flipped (entmod enx2)) (if pts ; Draw polyline (_polyline (mapcar 'cadr (vl-sort pts (function (lambda (a b) (< (car a) (car b)))))) (and (vlax-curve-isClosed ent1) (vlax-curve-isClosed ent2)) ) ) ) ) (redraw) (princ) ) And here is an animation of it working just because they are fun to look at :
 3 points
3 points -
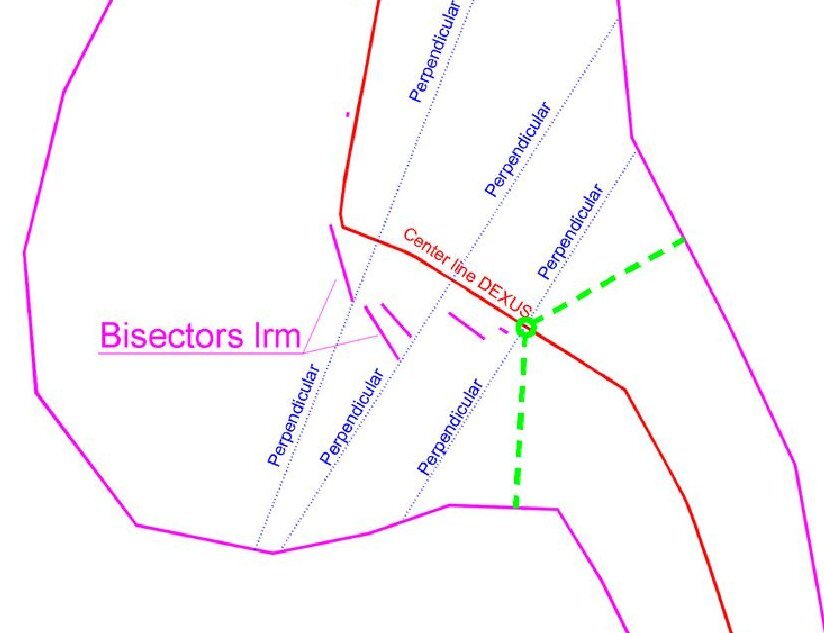
The concept is incorrect. To be equidistant, every point on the centerline must be the same distance (perpendicular) from the two margins.
1 point